How 3D Printing Is Making “Add-On” Sensors Obsolete
A research team from Singapore’s Nanyang Technological University (NTU) Singapore Centre for 3D Printing (SC3DP) and the University of Tokyo has succeeded in developing a soft continuum robot with sensor functionality built into the structural material itself. Published on May 14, 2026, in npj Flexible Electronics, a Nature-group peer-reviewed journal, the study presents an approach that uses the physical properties of a 3D-printed material as the sensor, with no external sensors required, offering a new answer to a long-standing barrier in soft robot deployment.
What Rigid Robots Cannot Do
When most people think of robots, they picture rigid metal arms. For factory assembly lines and welding operations, that kind of power and precision works well. But there are environments where rigid robots simply cannot go.
The inside of the human body, the depths of narrow pipelines, the interior of aircraft engines. These curved, confined spaces are physically inaccessible to rigid robots. And in situations that involve contact with people or delicate objects, rigidity itself becomes a hazard.
This is where soft robots come in. Built from materials like silicone and rubber, they bend smoothly along their entire length, with no joints, much like an octopus tentacle or an elephant’s trunk. Applications being researched around the world include assistance in endoscopic surgery, drug delivery inside the body, and remote inspection of pipelines and aircraft engines.
In the Dark: The Core Problem of Soft Robots
Soft robots, however, face a fundamental challenge that comes directly from their flexibility. They cannot tell what state they are in.
A rigid robot can measure its joint angles and immediately know its own shape and the position of its tip. A soft robot deforms along its entire length, making it extremely difficult to track which part is bent how far.
This matters because without knowing its current state, a robot cannot calculate what to do next. Robot motion depends on a continuous loop: confirm current state, calculate the gap to the target, decide the next move, execute, then confirm state again. If the first step of that loop is missing, the entire control system breaks down.
Humans can sense where their hand is and how much force they are applying even with their eyes closed. That is because muscles and joints contain receptors called proprioceptors. If that sense were completely lost, every arm movement would require visual confirmation before the next action could begin. In the dark, nothing could be done.
Soft robots have always been in that dark. The conventional solution was to attach external cameras or dedicated sensors after the fact, but that added weight and compromised flexibility. Increasing precision made the structure more complex. This contradiction has been the long-standing barrier to practical soft robot deployment.
3D Printing a Sensor Into the Structure
The research team’s approach centers on a conductive polymer composite (CPC) made from graphite and PDMS, a silicone-based material. When bent or stretched, this material changes its electrical resistance. The key point is that no separate sensor component is involved. The sensing capability comes from a physical property the material already possesses, not unlike the way human skin senses pressure and bending. Structure and function exist in a single substance.
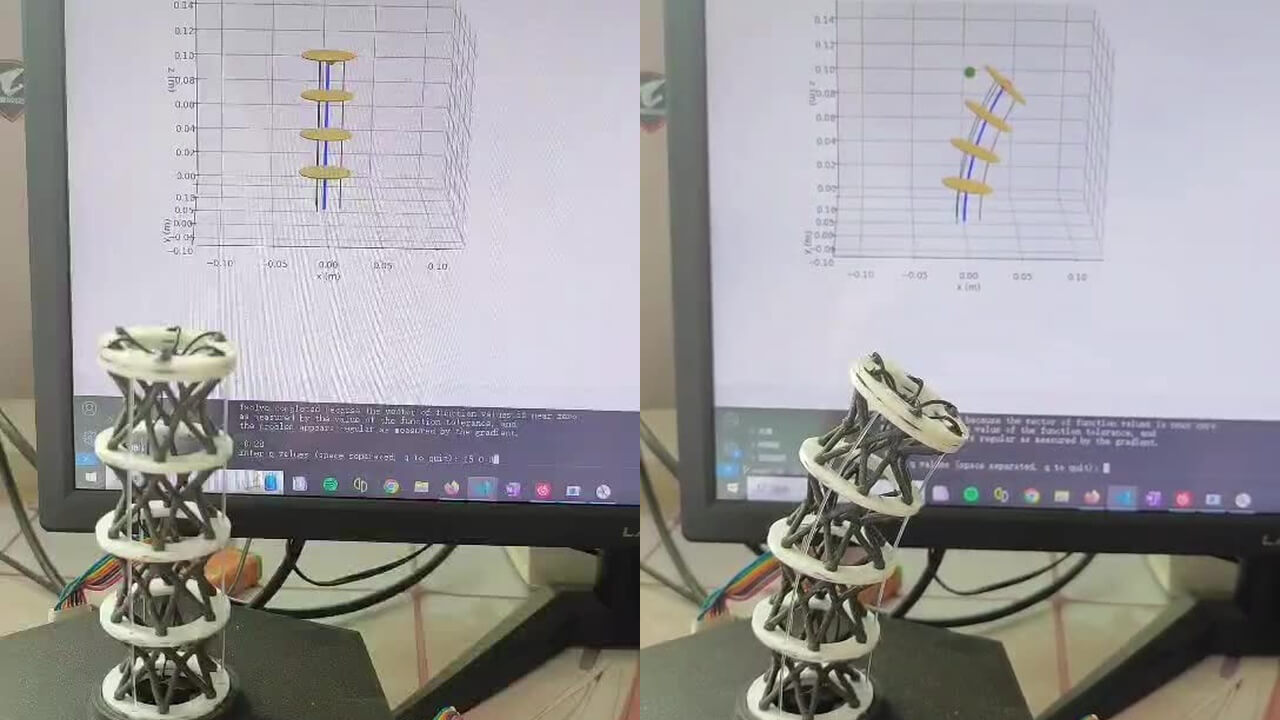
By 3D printing this CPC directly into a node-based lattice structure, the team embedded multiple sensing segments along the entire length of the robot. No external sensors are needed. The result is a design that detects its own state from within, without sacrificing flexibility. This kind of integration would have been extremely difficult to achieve with conventional manufacturing methods.
An AI That Reads the History of Movement
A new challenge emerged, however. The CPC’s resistance changes are not a simple proportional relationship. They are also influenced by the history of previous deformations. Bend the robot to the same angle via different paths and the resistance value will differ. This property, known as hysteresis, means that reading resistance values alone is not enough for accurate state estimation.
The team solved this with a neural network that combines two architectures: Transformer and Convolutional Neural Network (CNN). Transformer is well suited to reading time-series data, the patterns that emerge across time, and is the same architecture behind many language translation AI systems. CNN excels at capturing local patterns, the fine-grained changes happening right now. Together, they can simultaneously read both the immediate change in resistance and the full history of how the robot has moved, enabling accurate state estimation in near real time.
By combining resistance time-series data with tendon input signals, the system achieved stable sensing even under external loads. Experiments showed a mean end-effector position error of 3.8 mm and an RMSE of 6.3 mm. The team also demonstrated that the same sensing structure could predict the geometry of objects being grasped.
What This Could Mean, and Where Things Stand
The most promising near-term application is in medicine. A robot that can navigate the curved, narrow passages of the digestive tract or bronchial tubes while tracking its own state in real time would have significant value in endoscopy and surgical assistance. Current endoscopes depend heavily on the operator’s feel, and automatic state awareness would improve both precision and safety. Remote inspection of spaces inaccessible to humans, such as the interior of aircraft engines or industrial pipelines, is also a realistic application.
That said, this is laboratory-level research, and that should be stated clearly. A position error of 3.8 mm is not a poor result in robotics, but it does not yet meet the precision demands of surgery. The results were obtained in a controlled laboratory environment, and durability and long-term stability in actual body or field conditions remain to be verified. This is foundational research that shifts the conceptual framework for next-generation robot design, not an imminent commercial product.
AM Insight Asia Perspective
What this research demonstrates goes beyond robotics. It is a concrete example of 3D printing expanding its role from a technology that builds structures to a technology that designs function.
From “attach sensors after the fact” to “design the material as the sensor.” That shift in thinking is only possible with the design freedom that additive manufacturing provides. While major Western manufacturers continue to lead in volume production applications, the fact that this kind of foundational innovation is coming from Asian institutions, specifically the Singapore Centre for 3D Printing at Nanyang Technological University and the University of Tokyo, is worth noting.
AMIA will continue to follow this research as a signal of how next-generation robot design concepts are taking shape in the medical and inspection sectors.
Source:
・A 3D printing-enabled soft continuum robot with integrated sensing for multi-purpose predictions with machine learning – npj Flexible Electronics (2026)