3Dプリンティングが「後付け」の常識を変える
シンガポール・南洋工科大学(NTU)のSingapore Centre for 3D Printing(SC3DP)と東京大学の共同研究チームが、センサー機能を構造材料そのものに組み込んだソフトロボットの開発に成功した。2026年5月14日、npj Flexible Electronics(Nature系査読誌)に掲載された。外部センサーを一切使わず、3Dプリンティングで製造した素材の物質的特性そのものをセンサーとして活用するアプローチで、ソフトロボット実用化の長年の課題に一つの答えを示している。
硬いロボットにできないこと
ロボットといえば、金属製の硬い腕を想像する人が多いだろう。工場の組み立てラインや溶接作業では、硬くて力強いロボットは非常に有効だ。しかし、それが通用しない場面がある。
人体の内部、細い配管の奥、航空機エンジンの内側。こうした「曲がりくねった狭い空間」には、硬いロボットは物理的に入っていけない。また人や繊細なものに触れる場面では、硬さそのものが危険になる。
こうした場面で期待されているのが「ソフトロボット」だ。シリコンやゴムのような柔らかい素材で作られ、タコの触手や象の鼻のように、関節なしで全体がなめらかに曲がる。内視鏡手術の補助、体内での薬剤送達、配管や航空機エンジン内部の遠隔検査など、硬いロボットでは不可能な用途への応用が世界中で研究されている。
柔らかさの代償、「暗闇の中」の問題
しかしソフトロボットには、柔らかさゆえの根本的な課題がある。「自分が今どういう状態にあるかわからない」という問題だ。
硬いロボットは関節の角度を測れば、自分の形も先端の位置もわかる。しかしソフトロボットは全体がぐにゃっと変形するため、どこがどう曲がっているのかを把握することが極めて難しい。
これがなぜ問題かというと、現在の状態がわからなければ次にどう動くべきかも計算できないからだ。ロボットの動作は「現在の状態を確認する、目標との差を計算する、次の動きを決める、動く、また状態を確認する」というループで成り立っている。このループの最初の一歩が抜けると、制御全体が機能しない。
人間は目を閉じていても自分の手がどこにあるか、どのくらい力を入れているかがわかる。筋肉や関節に「固有受容器」と呼ばれるセンサーが備わっているからだ。もしこの感覚が完全に失われたら、腕を動かすたびに目で確認しなければ次の動作に移れなくなる。暗闇の中では何もできなくなる。
ソフトロボットはずっとこの「暗闇の中」にいた。従来の解決策は、外部カメラや専用センサーを後から取り付けることだったが、それでは重くなり柔軟性が損なわれる。精度を上げれば構造が複雑になる。この矛盾が、ソフトロボット実用化の長年の壁になってきた。
素材そのものをセンサーにする
南洋工科大学と東京大学の共同研究チームが採用したアプローチは、素材の物質的特性そのものをセンサーとして活用するというものだ。
研究チームが採用したのは、グラファイトとPDMS(シリコーン系素材)を混合した導電性ポリマー複合材(CPC)だ。この素材は曲げられると電気抵抗が変化するという性質を持つ。重要なのは、センサーという「別部品」を作って埋め込んだのではないという点だ。素材が物質として本来持っている特性を、そのままセンサー機能として活用している。人間の皮膚が圧力や曲げを感じるのに近い仕組みで、構造と機能がひとつの素材の中に共存している。
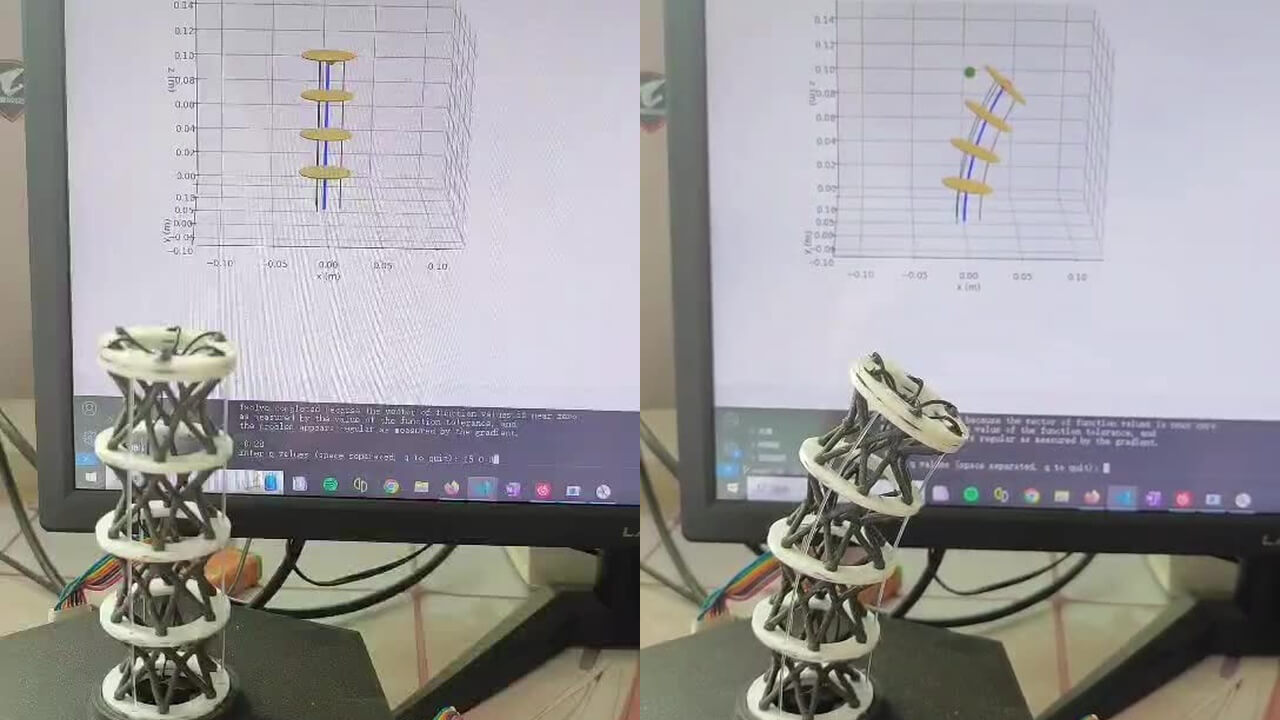
このCPCを3Dプリンティングでラティス(格子)構造に直接プリントすることで、複数のセンシングセグメントがロボット全体に沿って組み込まれる。外部センサーは一切不要。ロボットの柔軟性を損なわずに内部から自己状態を検知できるこの設計は、従来の製造工法では実現が極めて困難だった。
「過去の動き」まで読み取るAI
ただし、ここで新たな課題が生じる。CPCの電気抵抗変化は単純な比例関係にはなく、過去の変形履歴にも影響を受けるという性質があるのだ。同じ角度に曲げても、どういう経路をたどって曲げたかによって抵抗値が変わる。この「ヒステリシス(履歴依存性)」を無視すると、いくら抵抗値を測っても正確な状態推定はできない。
研究チームはこの問題をAIで解決した。採用したのは、TransformerとCNNという二つのアーキテクチャを組み合わせたニューラルネットワークだ。Transformerは時系列データ、つまり「時間の流れの中でのパターン」を読むのが得意で、文章翻訳AIなどにも使われている。畳み込みニューラルネットワーク(CNN)は局所的なパターン、つまり「直近の細かい変化」を捉えるのが得意だ。この二つを組み合わせることで、「今この瞬間の抵抗値の変化」と「これまでどう動いてきたかという履歴」を同時に読み取り、現在の状態を推定できる。
抵抗値の時系列データと、ロボットを動かすテンドン(腱)の入力情報を組み合わせてリアルタイムに状態を推定するこの仕組みにより、外部荷重がかかった状態でも安定したセンシングが可能になった。実験では先端部の平均位置誤差3.8mm、RMSE6.3mmという結果が得られた。さらに把持した物体の形状予測にも同じ構造が活用できることが示された。
応用の可能性と、現在地
この技術が最も期待される応用先は医療分野だ。消化器や気管支のような細くて曲がった管の中を進みながら、自分の状態をリアルタイムで把握できるロボットは、内視鏡や外科手術支援において大きな需要がある。現在の内視鏡は術者の感覚に依存する部分が大きく、状態を自動で把握できれば精度と安全性が向上する。航空機エンジンや配管内部など、人が入れない空間の遠隔検査への応用も現実的だ。
ただし現時点では研究室レベルの成果であることは明記すべきだろう。位置誤差3.8mmはロボット工学として悪くない数字だが、外科手術が求める精度にはまだ届かない。また実験室の制御された環境での結果であり、実際の体内や現場環境における耐久性・長期安定性の検証はこれからだ。「すぐ製品化」ではなく、次世代ロボット設計の概念を変える基礎研究という位置づけだ。
AM Insight Asia の視点
この研究が示す本質は、ロボット工学の技術的進歩だけではない。3Dプリンティングが「構造を作る技術」から「機能を設計する技術」へと役割を拡張しつつあることを、具体的に示す事例だ。
「センサーを後付けする」から「センサーとして設計する」へ。この発想の転換は、積層造形の設計自由度があって初めて実現できる。欧米の大手製造業が量産応用を主導する一方で、南洋工科大学のSingapore Centre for 3D Printing(シンガポール)と東京大学(日本)というアジアの研究機関がこうした基礎技術の革新で存在感を示している点も注目に値する。
医療・検査分野における次世代ロボットの設計概念として、この研究の動向をAMIAは引き続き注視していく。
Source:
・A 3D printing-enabled soft continuum robot with integrated sensing for multi-purpose predictions with machine learning – npj Flexible Electronics (2026)